Vu que cette valeur est très proche à la valeur calculée, il n’est pas nécessaire de contrôler la nouvelle valeur de l’angle ß.
Nous attirons l’attention sur le fait qu’existant une vaste gamme de valeurs de L, le nouveau calcul de ß n’est presque jamais nécessaire, en effet, les petites variations de longueur de la courroie sont réglées par les supports du moteur ou par les coulisses de tension.
Il est possible avec cette donnée d’introduire la valeur d’un coefficient C3 qui dépend de la fréquence des oscillations des parties libres de la courroie.
Dans le tableau correspondant, on obtient pour un L = 1675 mm. C3 = 0,93.
A ce stade, on entre dans le tableau qui fournit les valeurs de la puissance spécifique Ps transmise par chaque courroie pour chaque type de section.
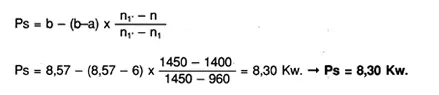
En entrant avec le dp et n1, on obtient par interpolation des valeurs : Ps = 8,30 Kw comme indiqué ci-après:
INTERPOLATION
pour dp = 180 mm. e n1 = 1450 tour/min pour r = 1,4 choisir Ps = 8,57 Kw (pag. 30)
pour dp = 180 mm. e n1 = 960 tour/min pour r = 1,4 choisir Ps = 6 Kw (pag. 30)
En indiquant par:
Ps = 6 = a; Ps = 8,57 = b; n1 = 960; n1 = 1450; n1 = 1400
la relation qui permet d’obtenir Ps pour n = 1400 tours/min. est donnée par la formule:
On peut finalement calculer le nombre de courroies nz
 théorique
théorique
Cette valeur est toujours arrondie par excès nz = 5
NOTE IMPORTANTE
Nous conseillons un équilibrage statique pour les poulies qui ne dépassent pas des vitesses périphériques de 30 m/sec et un équilibrage dynamique pour celles qui dépassent cette valeur.
Il faut obligatoirement respecter sur toutes les poulies un alésage maximum de l’orifice non supérieur à 0,625 fois le diamètre du moyeu ; ou ce qui est identique, le diamètre du moyeu qui doit être supérieur ou égal à 1,6 fois le diamètre de l’orifice.